— датчики касания / Хабр")
Каталог конструкторов для самостоятельной сборки роботов
Togami » 07 июл Пт. Hamulus » 10 июл Пн. Togami » 10 июл Пн. Hamulus » 11 июл Вт.






")

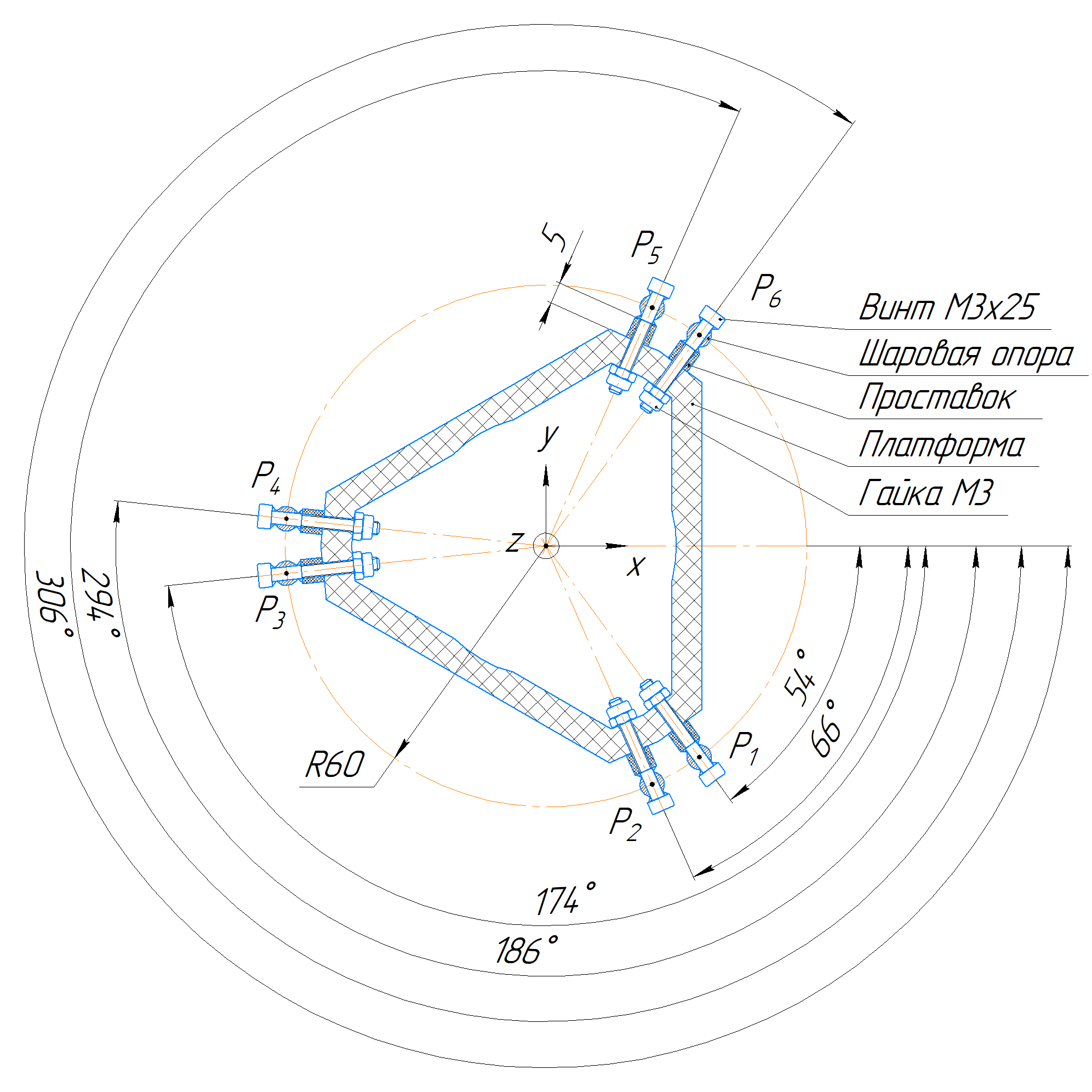
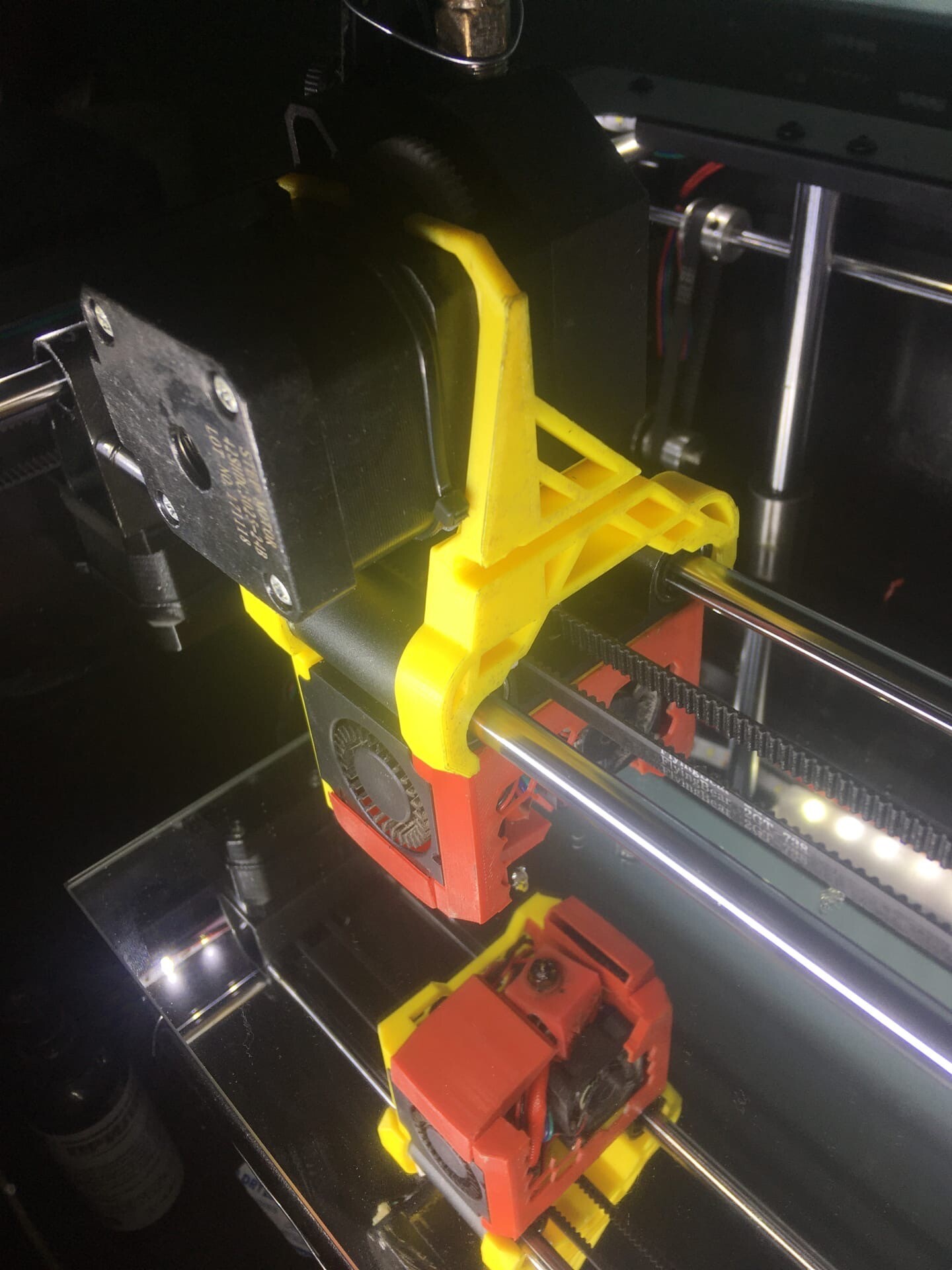
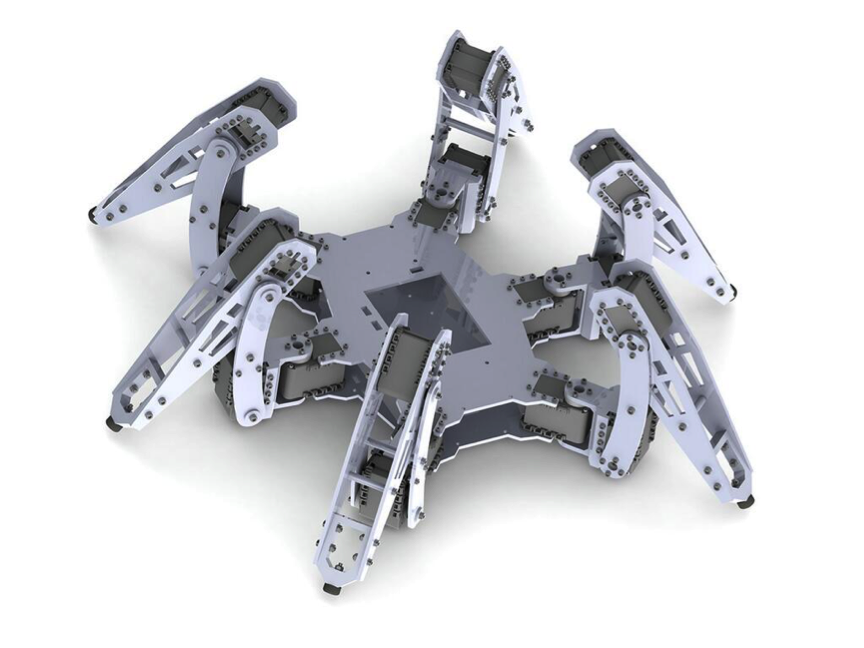
Всем привет! Был сделан очередной шаг к реализации алгоритма адаптации к ландшафту. До текущего момента я не мог придумать оптимальное решение для определения состояния ноги: наступила она на землю или нет. И вот спустя пол года я случайно наткнулся на интересный датчик, при помощи которого можно реализовать нужную конструкцию, позволяющую определить не только момент касания ногой земли, а так же усилие. Этапы разработки: Часть 1 — проектирование Часть 2 — сборка Часть 3 — кинематика Часть 4 — математика траекторий и последовательности Часть 5 — электроника Часть 6 — переход на 3D печать Часть 7 — новый корпус, прикладное ПО и протоколы общения Часть 8 — улучшенная математика передвижения Часть 9 — завершение версии 1.


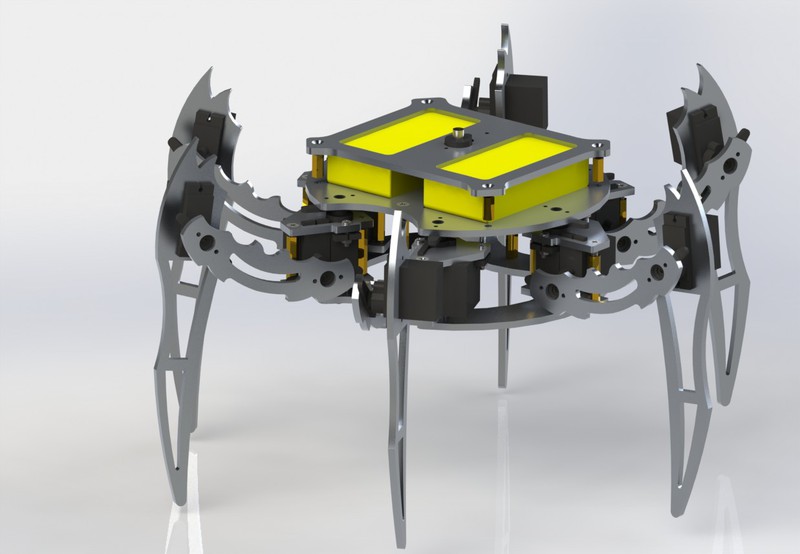







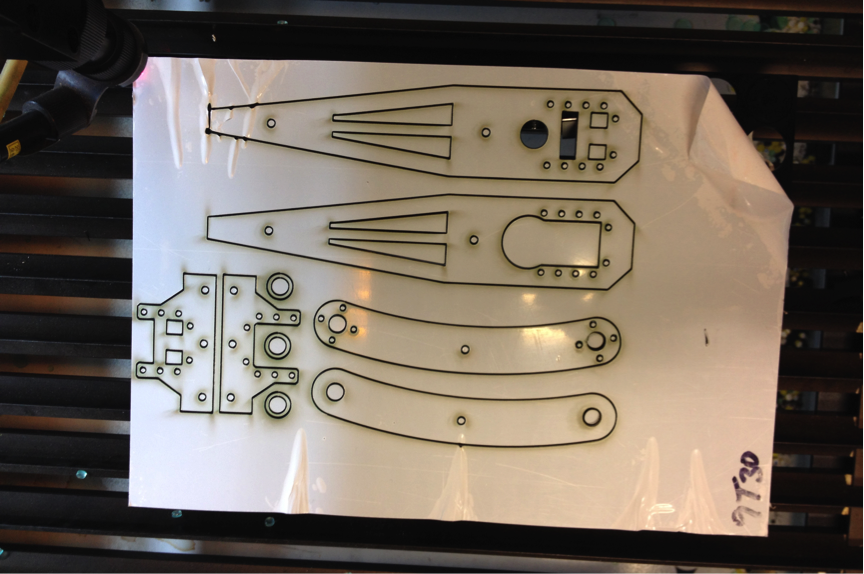
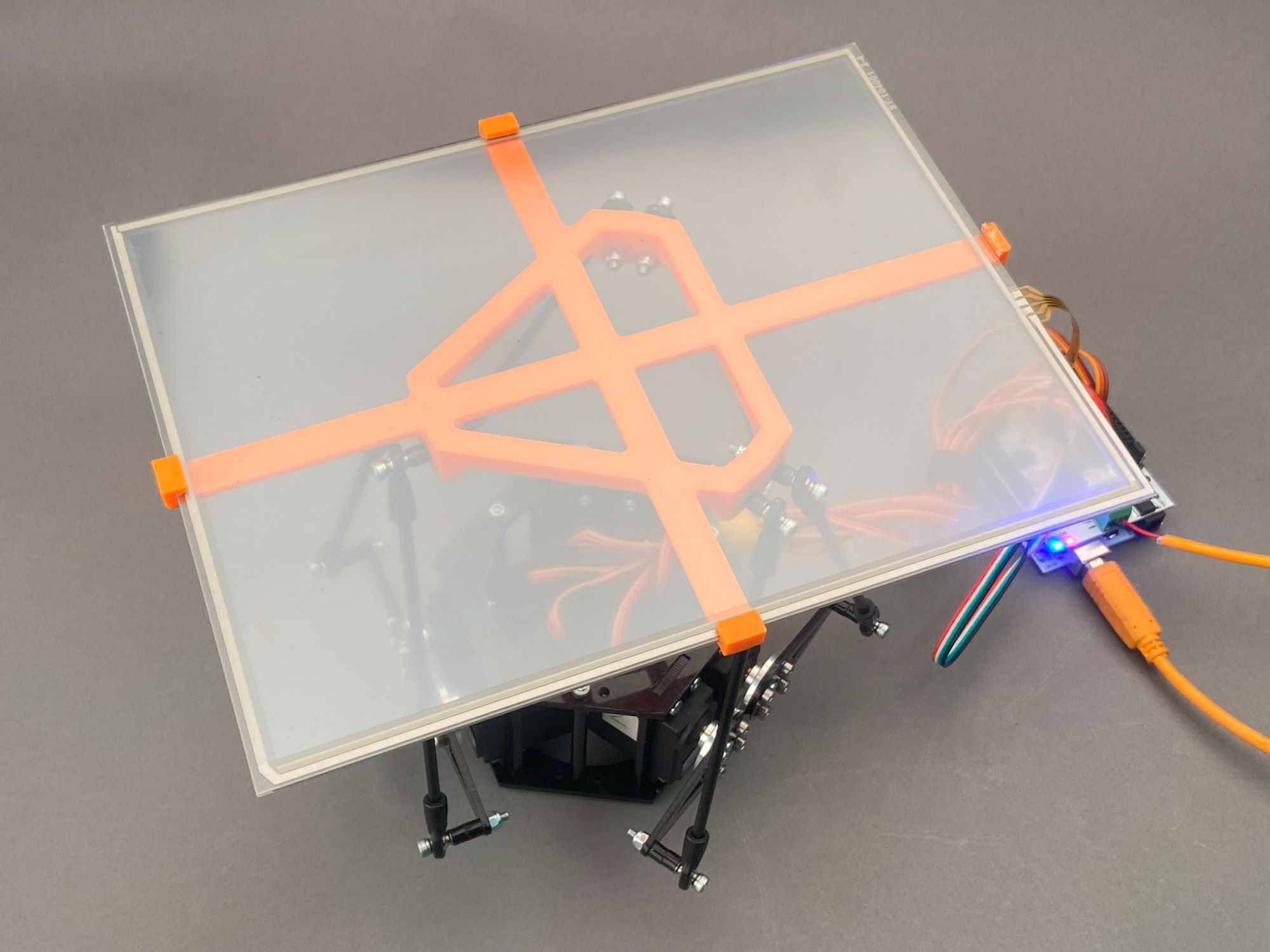
Тут не будет технических подробностей и инструкций, просто хочу показать людям свое творение и услышать какую-нибудь критику или предложения. Если вы хотите больше технических подробностей, то я в ходе разработки публикую статьи на хабре ссылки я оставлю в конце. Возможно вы не поверите, но сделан он из фанеры 3мм с применением лазерной резки. Долго и нудно красил фанеру перманентным маркером 6 штук ушло , но результат порадовал.